微波视觉三维SAR关键技术及实验系统初步进展
时间: 分类:电子论文 浏览次数:
摘要:合成孔径雷达(SyntheticApertureRadar,SAR)三维成像在复杂地形测绘、复杂环境下目标发现与识别等方面具有重要应用潜力,是当前SAR领域的重要发展方向之一。为推动SAR三维成像技术的发展和应用,中科院空天院牵头设计并研制了一套无人机载微波视觉三维SAR实验系统(MV3DSAR),为相关技术研究和验证提供实验平台。目前该系统的单极化版本已研制完成,并在天津开展了首次校飞实验。本文介绍了该系统的基本构成、主要性能、以及系统和数据处理的关键技术,给出了首次校飞实验的实施情况以及初步的数据处理结果,验证了系统的基本性能指标和三维成像能力。该系统为后续SAR三维成像数据集的构建和处理方法研究提供了良好的实验验证平台。
关键词:SAR三维成像;微波视觉;无人机载SAR;干涉定标;运动补偿
1引言
合成孔径雷达(SyntheticApertureRadar,SAR)三维成像能够解决三维目标及场景投影至二维成像平面而造成的叠掩问题,在陡峭地形测绘、城区测绘,以及目标探测和识别等方面有着重要的应用潜力,是SAR技术发展的重要方向之一。当前提出的SAR三维成像体制主要包括层析SAR和阵列干涉SAR[1]。其中,层析SAR对SAR系统本身没有特殊要求,但为了保证数据的相干性,对SAR轨道或飞行航迹的控制有严格要求,存在数据获取时间周期长、难度大的问题;阵列干涉SAR通常指具有3个或3个以上天线阵元,一次飞行就可获得3个或3个以上空间多角度相干观测的SAR系统,其能够排除时间去相干的影响,一次飞行就可实现三维成像[2],因此成为SAR三维成像的一种重要体制,受到了各国的重视。
德国于2005年开始研制无人机载阵列三维SAR系统ARTINO(AirborneRadarforThrre-dimensionnalImagingandNadirObservation)[3],其利用线阵构成的实孔径以及由载机航行构成的合成孔径实现二维面阵采样。为了减少雷达阵元的个数,采用两边发射中间接收的稀疏阵列配置;同时使用能够达到低能耗以及小尺寸的调频连续波(FMWC)Ka波段雷达;使用惯性导航系统以及差分GPS传感器记录航行轨迹,使用CCD和激光单元精确记录挂载于机翼上的每个阵元的抖动误差。ARTINO整套系统安装于无人机上,该无人载机翼展4米、重量25kg,飞行速度10-15米/秒,实验飞行高度200米左右。
其于2010年首飞获得定标点成像结果[4][5],试验场地的目标为三个相距10米的角反射器,但至今没有进一步的成像试验结果报道。法国宇航局(ONERA)也开展了无人机载3DSAR系统(DRIVE系统)的研制,工作于Ka波段,中心频率为35GHz,发射信号为调频连续波,带宽800MHz。试验载机是翼展23米重约600kg的滑翔机,飞行速度约50米/秒,最高飞行高度9145米。
2007年法国宇航局首次公布了其在2006年10月获取的工作于下视模式的高度方向成像结果,但目前尚未报道进一步的三维成像结果。中科院电子所2005年开始研制机载阵列三维SAR系统,采用长2米重150kg的刚性大天线阵来保证基线的稳定性,于2015年获得了国际首幅三维场景成像结果[2][6]。
上述现状表明,为实现三维成像,当前阵列干涉三维SAR系统的复杂度很高、研制难度很大,系统小型化及其应用推广均具有较大的难度。也即,三维成像对于目前的SAR系统而言是一个“豪华选项”,需要付出很大的成本。为改变这一现状,将SAR三维成像从“豪华选项”变为“普通选项”,中国科学院空天信息创新研究院牵头,在国家自然基金重大项目支持下,正在开展“合成孔径雷达微波视觉三维成像理论与应用基础研究”,以期将三维成像对多角度观测数量的要求降低至小于等于5,从而降低系统复杂度或数据获取周期,实现高效能三维成像,促进SAR三维成像技术的应用推广[1]。
在该项目支持下,中科院空天院联合中科宇达(北京)科技有限公司,设计研制了一套小型无人机载阵列干涉SAR系统,称为微波视觉三维SAR(MicrowaveVisionthree-dimensionalSAR,MV3DSAR)实验系统,用于进行数据获取和技术验证,并用于SAR微波视觉三维成像数据集的构建[7],为该领域的研究提供必要的基础平台。目前该系统的单极化版本已经研制完成,并于2021年12月初在天津临港地区开展了首次集成校飞实验,初步验证了系统的基本性能和三维成像能力。
本文介绍了该系统的基本构成、主要性能、以及系统和数据处理的关键技术,给出了首次校飞实验的方案和实施情况,以及初步的数据处理结果,并指出了后续研究方向。 本文后续内容安排如下:第2小节介绍了MV3DSAR基本情况和系统关键技术;第3小节叙述了MV3DSAR系统校飞实验的方案及实施情况;第4小节给出了数据处理流程和二维成像、系统参数标定、三维成像等关键步骤的具体方法,并给出了初步的数据处理结果;第5节总结全文并指出后续研究方向。
2MV3DSAR系统及关键技术
为了便于开展飞行实验,降低实验成本,同时具有较高的可重构能力,支撑SAR微波视觉三维成像方法的研究和验证,MV3DSAR系统的设计遵循如下基本理念:
1)轻量化,工业级无人机可挂载;2)基线可重构,可以根据研究需求进行天线的灵活配置,从而实现不同的基线构型;3)多极化,可通过天线和通道的模块化配置实现单极化和全极化模式。目前,单极化版本的MV3DSAR系统已经研制完成,全极化版本尚未进行集成和验证,为此,本文重点介绍当前的单极化MV3DSAR系统。
2.1MV3DSAR系统构成
MV3DSAR系统的总体构成,其主要由微小型SAR载荷、无人机平台及导航系统三部分组成,通过结构件进行固定和连接。
2.2Ku-SAR载荷参数
MV3DSAR系统最核心的是Ku波段阵列干涉SAR,其采用调频连续波体制,信号带宽为1.2GHz,中心频率为15.2GHz,重量为7.07kg。目前版本MV3DSAR为单极化系统,等效的天线阵列通道数为4,也即一次飞行可以获得4幅相干的单极化SAR图像,后续将进一步扩展为全极化系统。系统天线支架结构长度为1.29米,有效长度为1.284米,在有效长度内的0mm、107mm、214mm、…、1284mm处一共打有12排孔,用于固定天线并实现各种基线的灵活配置。
本系统将每个极化的阵列通道数设计为4,主要是考虑城区等实际场景中,叠掩数目大部分为2、小部分为3,叠掩数目大于3的情况占比非常小,为此可重点考虑叠掩数目小于等于3的情况[8]。对于单极化而言,4个通道将获得4个幅度、4个相位共8个观测量,而2个叠掩则包含2个斜高向位置、2个幅度、2个相位共6个待求量,因此理论上可以通过4幅相干图像三维成像达到区分两个叠掩的目的;而对于全极化而言,4组全极化相干图像可获得16个幅度、16个相位共32个观测量,理论上可以实现3个叠掩,即3个斜高向位置、12个幅度、12个相位共27个未知量的求解,从而可以满足大部分应用的需求,相关分析可参考文献[9]。
需要说明的是,SAR三维成像所需空间相干观测数量的理论边界是一个十分复杂的问题,其与高程向分辨率、信噪比、三维成像方法等众多因素均相关,目前已有一些相关研究[8][10][11]但仍然存在很大的探索空间。尤其,在SAR微波视觉三维成像新方法下所需相干观测数量的理论边界,是一个值得探索研究的问题。
2.3系统关键技术
MV3DSAR系统致力于小型化、经济化、高精度,在系统研制过程中突破的主要关键技术包括以下几个方面:
1)系统非线性误差处理技术
Ku-SAR系统采用调频连续波体制,由系统引入以及信号本身存在的非线性误差会对SAR成像结果产生影响。为此,Ku-SAR一方面采用预失真补偿手段提高激励信号线性度,另一方面通过在实验室采用延迟线定标方法与非线性处理方法对信号中的系统非线性误差项进行估计与校正[12],使得校正后的信号非线性相位误差小于±0.2弧度,保证SAR成像结果满足指标要求。
2)高精度运动补偿数据获取技术
Ku-SAR系统搭载于轻小型运动平台,实际作业时平台可产生较大范围的运动误差及姿态变化,需对其进行精确测量,以便后续处理中进行补偿[13][14]。Ku-SAR系统集成了微型惯性测量单元(MIMU)的控制模块以及GPS位置测量模块,结合导航系统将测量所得惯性导航数据与GPS位置数据融合,通过双捷联处理方法获取相对位置精度优于0.3mm的运动误差数据,以满足成像处理的要求。
3)多通道一致性技术
Ku-SAR系统具有多个接收通道,以满足多极化、阵列干涉等任务需求。多通道信号之间延时、增益与相位的一致性是保证后续处理正确性的核心关键因素。Ku-SAR系统采用了基于低温共烧陶瓷(LowTemperatureCo-firedCeramic,LTCC)技术的多通道一致性设计、一致性定标回路与内定标设计、多通道间电磁屏蔽防串扰设计等有效方案[15],使得系统通道间相位一致性达到±5度以内,为在实验室对系统多次重复上电测量得到的通道间相位差异结果,其包括了发射通道、接收通道、天线模拟环路的误差影响。相对于美国华盛顿大学于2019年在文献[16]中报道的通道间相位误差在0.4至1弧度内变化(±0.3弧度)而言,本系统通道间相位一致性明显更优,为获取有效数据提供了可靠保障。
4)小型化设计技术Ku-SAR系统针对小型化设计需求,在系统的多个组成模块上均采用小型化设计方案[15][17]。其中,数字模块采用基于AXI(AdvancedeXtensibleInterface)总线的FPGA一体化设计技术,将控制、AD、DA、定时等多个模块集成在一个单片模块上,形成了集控制、处理等多功能为一体的高度集成化数字模块;在射频模块上采用LTCC工艺优化设计各个射频元器件的集成方案[18],形成具有高集成度,高可靠性的射频模块。
通过各模块的小型化设计,使得Ku-SAR系统达到较小的体积和重量,满足可搭载于工业级无人机的要求,便于实验任务的开展。3MV3DSAR校飞实验为了验证MV3DSAR系统的基本性能指标和三维成像能力,我们于2021年12月1日-2日在天津临港经济区开展了首次集成校飞实验。
3.1实验对象
实验对象为临港商务大厦,其由2栋15层塔楼及二层裙房组成,大厦区域占地面积22905.6平方米,楼高69.2米,楼间距57.6米,裙房高12.4米、长105.6米、宽72.4米。该大楼结构具有一定的代表性,且周边比较空旷,便于进行定标器布设。
3.2航线及基线设计
为兼顾航高限制、成像范围、最大不模糊高度、高程向分辨率以及三维成像最终结果的完整性,此次实验设计的飞行高度为400米,波束范围内的成像幅宽为356.18米。天线采用2发2收方式共形成4个等效天线相位中心,通过空间模糊函数的分析,优选了2种基线构型。
虚线表示结构件上打孔的位置,R1、R2为两个接收天线安装的位置,T1、T2为两个发射天线安装的位置,蓝色圆点表示等效天线相位中心的位置,两种模式的等效基线。最大不模糊高度和斜高向理论瑞利分辨率曲线如图7所示。可见,随着入射角的增加,不模糊高度逐渐变大,但同时瑞利分辨率也逐渐变差,且由于飞行高度较低,近距到远距的瑞利分辨率相差一倍以上,在三维成像处理及结果分析中需充分考虑入射角的变化。
此外,模式2最大基线较长,理论的高程分辨率更佳,而模式1最小基线较短,可以获得更大的最大不模糊高度。然而,临港大厦69.2米的高度已超过0.107米最小基线对应的50米左右的不模糊高度,给三维成像带来了额外的挑战。此外,由空间模糊函数图可见,两种模式分别在斜高向的±8.4m、±28.4m和±15.2m、±21.6m处存在高相关区域,需要在三维成像处理中采用有效手段来避免求解错误。综上可见,本MV3DSAR的三维成像处理存在很大的难度,本文第4节中将通过引入图像视觉语义信息[19]等方法以获得较好的三维成像成果。
4MV3DSAR数据处理关键技术及初步结果
本次MV3DSAR集成校飞实验的主要目的是验证MV3DSAR系统在分辨率、通道幅相不平衡等方面的基本性能指标,并验证其进行三维成像的可行性。由于本次实验获取了2个模式8个方向的观测数据,数据量较大,且该系统只有4个通道,三维成像难度很大,因此相关研究和数据处理工作目前仍在进行之中。本小节主要给出对于系统误差的标定方法与结果,以及初步的三维成像结果,以验证系统的基本性能和三维成像的可行性。
4.1数据处理总体流程
针对多个观测方向获取的阵列干涉SAR数据,我们设计的总体处理流程。首先对每个方向的4通道阵列干涉SAR原始回波数据进行二维成像处理;然后基于系统误差具有良好稳定性的前提,通过多个方向的SAR图像数据联合进行系统误差参数标定,包括系统延迟误差、通道幅度和相位误差,并确定和验证基线参数;随后进行干涉图像配准和相干性分析,为第三维成像提供基础;接着进行第三维成像处理,得到三维点云和点云对应的散射系数;最后对三维成像结果进行分析与评价,从而得到最终的三维成像结果和对三维成像性能的分析结果。
在上述处理流程中,关键技术包括二维成像、系统参数标定、第三维成像这三个方面。二维聚焦的精度将直接影响图像信杂噪比,从而影响三维成像效果;同时二维聚焦精度也将影响图像语义信息的提取,对SAR微波视觉三维成像造成影响。系统延迟、基线、基线角、通道幅度/相位差异等参数对三维成像的求解结果有很大影响,尤其当通道数量较少时,三维成像求解的病态性愈加严重,微小的参数误差就可能导致结果的严重偏差,甚至使得三维重建失败,因此,系统参数的标定至关重要。第三维成像则是本系统数据处理的核心环节,直接决定三维成像的成败。为此,后续小节将重点针对上述关键步骤进行处理方法的阐述并给出初步处理结果。
4.2二维成像
通过航迹解析,8个方向航迹(ID0-ID7)与参考匀速直线航迹的偏离程度,飞行方向上由于非匀速运动引起的偏离在2米以内,在垂直飞行方向航迹控制在1米以内,且大部分控制在0.4米半径的“管道”内,航迹控制较好。通过姿态数据解析,8个方向飞行的姿态数据测量结果,横滚角变化在3°以内,偏航角变化在2°以内,俯仰角变化在4°以内,姿态变化相对较大。
5结束语
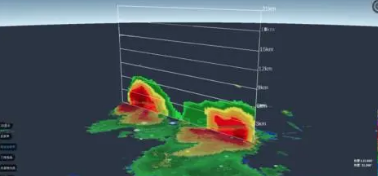
本文介绍了微波视觉三维SAR实验系统(MV3DSAR)的组成、系统参数和研制关键技术,并给出了该系统首次集成校飞实验的模式设计、航线设计和定标器布设情况,最后给出了系统误差标定的方法和结果,并给出了初步的三维成像结果,验证了该系统的基本性能和三维成像能力,可以为后续SAR微波视觉三维成像理论方法研究和验证提供支撑平台。在国家自然基金重大项目支撑下,项目团队后续将进一步开展基于微波视觉的SAR三维成像方法研究,并继续开展该实验数据的处理和指标评估工作,推动SAR三维成像技术的应用。
参考文献
[1]丁赤飚,仇晓兰,徐丰,等.合成孔径雷达三维成像——从层析,阵列到微波视觉[J].雷达学报,2019,8(6):693-709.DINGChibiao,QIUXiaolan,XUFeng,etal.Syntheticapertureradarthree-dimensionalimaging——fromTomoSARandarrayInSARtomicrowavevision[J].JournalofRadars,2019,8(6):693–709.doi:10.12000/JR19090.
[2]张福博.阵列干涉SAR三维重建信号处理技术研究[D].中国科学院大学,2015.ZHANGFubo.ResearchonSignalProcessingof3-DreconstructioninLinearArraySyntheticApertureRadarInterferometry[D].[Ph.Ddissertation],UniversityofChineseAcademyofSciences,2015
[3]J.Klare,M.Weiss,O.Peters,A.Brenner,J.Ender,ARTINO:ANewHighResolution3DImagingRadarSystemonanAutonomousAirbornePlatform,2006IEEEInternationalSymposiumonGeoscienceandRemoteSensing
[4]Weiss,Matthias,Peters,Olaf,Ender,Joachim,FirstFlightTrialswithARTINO,EuropeanConferenceonSyntheticApertureRadar2008.
作者:仇晓兰*①②③④焦泽坤①④杨振礼⑤程遥②③蔺蓓②③罗一通②③王卫②③董勇伟⑤周良将①④丁赤飚*①④
最新期刊论文咨询
- 浏览量:606档案全过程中安全管理风险如何控制
- 浏览量:572中欧班列推动区域经济一体化发展的研究
- 浏览量:362热管式船舶烟气余热温差发电装置的设计与研究
- 浏览量:344电力电缆的故障检测技术分析
- 浏览量:382模块化的锂电池组管理系统
- 浏览量:299探讨变电设备的运行维护
- 浏览量:301关于通信服务企业营销管理体系的构建研究
- 浏览量:346光纤通信技术发展应用现状及未来展望
- 浏览量:239电气工程中电气自动化如何实现及应用
- 浏览量:370探究某通信设备基础上的数字语音传输设计
SCI核心期刊推荐
-

-
Scientific Reports
数据库:SCI
ISSN:2045-2322
刊期:进入查看
格式:咨询顾问
-

-
ACTA RADIOLOGICA
数据库:SCI
ISSN:0284-1851
刊期:进入查看
格式:咨询顾问
-

-
Materials Today Communications
数据库:SCI
ISSN:2352-4928
刊期:进入查看
格式:咨询顾问
-

-
PLANT JOURNAL
数据库:SCI
ISSN:0960-7412
刊期:进入查看
格式:咨询顾问
-

-
APPLIED SURFACE SCIENCE
数据库:SCI
ISSN:0169-4332
刊期:进入查看
格式:咨询顾问